Simulation¶
PDE Simulation Basics¶
Write something interesting here :-)
Multiple PDE Simulation¶
The aim of the class CanonicalEquation is to handle more than one pde. For one pde
CanonicalForm would be sufficient. The simplest way to get the required 
CanonicalEquation’s is to define your problem in WeakFormulation’s and make use of
parse_weak_formulations(). The thus obtained CanonicalEquation’s you can pass to
create_state_space to derive a state space representation of your multi pde system.
Each CanonicalEquation object hold one dominant CanonicalForm and at maximum  other
other
CanonicalForm’s.
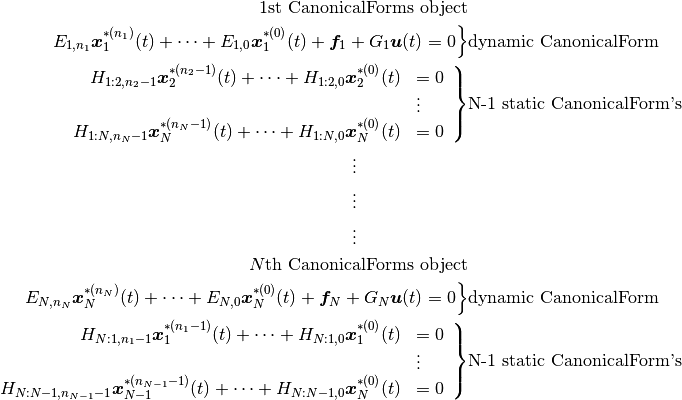
They are interpreted as
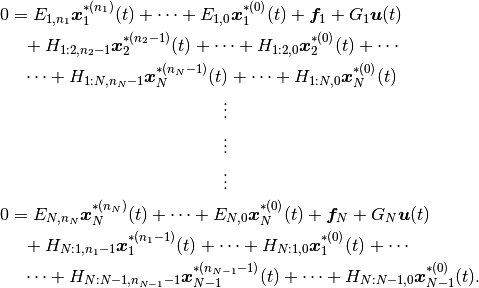
These equations can simply expressed in a state space model

with the weights vector
