Simulation of the Euler-Bernoulli Beam¶
In this example, the hyperbolic equation of an euler bernoulli beam, clamped
at one side is considered.
The domain of the vertical beam excitation  is regarded to be
is regarded to be
![[0, 1] \times \mathbb{R}^+](../_images/math/74927ef48953e33428d329a926880d4d006c055c.png) .
.
The governing equation reads:
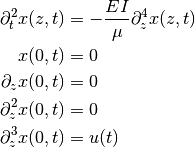
With the E-module  , the second moment of area
, the second moment of area  and the
specific density
and the
specific density  .
In this example, the input
.
In this example, the input  mimics the force impulse occurring if
the beam is hit by a hammer.
mimics the force impulse occurring if
the beam is hit by a hammer.
Spatial disretization¶
For further analysis let  denote
the spatial operator and
denote
the spatial operator and
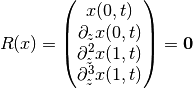
denote the boundary operator.
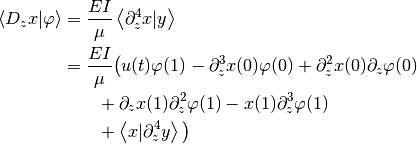
Repeated partial integration of the expression
![\begin{align*}
\left< D_z x | \varphi \right>
&= \frac{EI}{\mu} \left< \partial^4_z x | y \right>\\
&= \frac{EI}{\mu} \left(
\left[\partial^3_z x \varphi \right]_0^1
-\left[\partial^2_z x \partial_z\varphi \right]_0^1
\left[\partial^1_z x \partial^2_z\varphi \right]_0^1
-\left[ x \partial^3_z\varphi \right]_0^1
\right)\\
&\quad + \frac{EI}{\mu} \left< x | \partial^4_z y \right>
\end{align*}](../_images/math/d06ef601a014ae8f03f0159084d6130225371ba8.png)
and application of the boundary conditions shows that
 if
if
 . Therefore, the spatial operator is self-adjoint.
. Therefore, the spatial operator is self-adjoint.
Modal Analysis¶
Since the operator is self-adjoined, the eigenvectors of the operator generate a orthonormal basis, which can be used for the approximation.
Hence, the problem to solve reads:
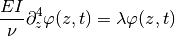
Which is achieved by choosing
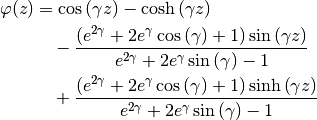
where  .
This is done in
.
This is done in calc_eigen() .
Using this basis, the approximation
is introduced.
Projecting the equation on the basis of eigenvectors
 yields
yields

for every  . Substituting the approximation leads to
. Substituting the approximation leads to
where the application of  and the inner product can be swapped since
is a bounded operator.
Finally, using the solution of the eigen problem yields
and the inner product can be swapped since
is a bounded operator.
Finally, using the solution of the eigen problem yields
which simplifies to

since, due to orthonormality,  is
zero for all
is
zero for all  and
and  for
for  .
.
Performing the same steps for the left-hand side yields:

Thus, the ordinary differential equation system
with the new state vector

the integrator chain  and eigenvalue matrix
and eigenvalue matrix
 is
derived.
Since the resulting system is autonomous, apart from interesting simulations,
not much can be done fro a control perspective.
is
derived.
Since the resulting system is autonomous, apart from interesting simulations,
not much can be done fro a control perspective.
Alternative Variant¶
Using the weak formulation, which is gained by projecting the original equation on a set of test functions and fully shifting the spatial operator onto the test functions and substituting the boundary conditions
and inserting the modal approximation from above, the system can be simulated
for every arbitrary input . Note that this approximation converges
over the whole spatial domain, but not punctually, since using the eigenvectors
 but
but  .
.
source code:
"""
This example simulates an euler-bernoulli beam, please refer to the
documentation for an exhaustive explanation.
"""
import numpy as np
import sympy as sp
import pyinduct as pi
from matplotlib import pyplot as plt
class ImpulseExcitation(pi.SimulationInput):
"""
Simulate that the free end of the beam is hit by a hammer
"""
def _calc_output(self, **kwargs):
t = kwargs["time"]
a = 1/20
value = 100 / (a * np.sqrt(np.pi)) * np.exp(-((t-1)/a)**2)
return dict(output=value)
def calc_eigen(order, l_value, EI, mu, der_order=4, debug=False):
r"""
Solve the eigenvalue problem and return the eigenvectors
Args:
order: Approximation order.
l_value: Length of the spatial domain.
EI: Product of e-module and second moment of inertia.
mu: Specific density.
der_order: Required derivative order of the generated functions.
Returns:
pi.Base: Modal base.
"""
C, D, E, F = sp.symbols("C D E F")
gamma, l = sp.symbols("gamma l")
z = sp.symbols("z")
eig_func = (C*sp.cos(gamma*z)
+ D*sp.sin(gamma*z)
+ E*sp.cosh(gamma*z)
+ F*sp.sinh(gamma*z))
bcs = [eig_func.subs(z, 0),
eig_func.diff(z, 1).subs(z, 0),
eig_func.diff(z, 2).subs(z, l),
eig_func.diff(z, 3).subs(z, l),
]
e_sol = sp.solve(bcs[0], E)[0]
f_sol = sp.solve(bcs[1], F)[0]
new_bcs = [bc.subs([(E, e_sol), (F, f_sol)]) for bc in bcs[2:]]
d_sol = sp.solve(new_bcs[0], D)[0]
char_eq = new_bcs[1].subs([(D, d_sol), (l, l_value), (C, 1)])
char_func = sp.lambdify(gamma, char_eq, modules="numpy")
def char_wrapper(z):
try:
return char_func(z)
except FloatingPointError:
return 1
grid = np.linspace(-1, 30, num=1000)
roots = pi.find_roots(char_wrapper, grid, n_roots=order)
if debug:
pi.visualize_roots(roots, grid, char_func)
# build eigenvectors
eig_vec = eig_func.subs([(E, e_sol),
(F, f_sol),
(D, d_sol),
(l, l_value),
(C, 1)])
# print(sp.latex(eig_vec))
# build derivatives
eig_vec_derivatives = [eig_vec]
for i in range(der_order):
eig_vec_derivatives.append(eig_vec_derivatives[-1].diff(z, 1))
# construct functions
eig_fractions = []
for root in roots:
# localize and lambdify
callbacks = [sp.lambdify(z, vec.subs(gamma, root), modules="numpy")
for vec in eig_vec_derivatives]
frac = pi.Function(domain=(0, l_value),
eval_handle=callbacks[0],
derivative_handles=callbacks[1:])
frac.eigenvalue = - root**4 * EI / mu
eig_fractions.append(frac)
eig_base = pi.Base(eig_fractions)
normed_eig_base = pi.normalize_base(eig_base)
if debug:
pi.visualize_functions(eig_base.fractions)
pi.visualize_functions(normed_eig_base.fractions)
return normed_eig_base
def run(show_plots):
sys_name = 'euler bernoulli beam'
# domains
spat_bounds = (0, 1)
spat_domain = pi.Domain(bounds=spat_bounds, num=101)
temp_domain = pi.Domain(bounds=(0, 10), num=1000)
if 0:
# physical properties
height = .1 # [m]
width = .1 # [m]
e_module = 210e9 # [Pa]
EI = 210e9 * (width * height**3)/12
mu = 1e6 # [kg/m]
else:
# normed properties
EI = 1e0
mu = 1e0
# define approximation bases
if 0:
# somehow, fem is still problematic
approx_base = pi.LagrangeNthOrder.cure_interval(spat_domain,
order=4)
approx_lbl = "complete_base"
else:
approx_base = calc_eigen(7, 1, EI, mu)
approx_lbl = "eig_base"
pi.register_base(approx_lbl, approx_base)
# system definition
u = ImpulseExcitation("Hammer")
x = pi.FieldVariable(approx_lbl)
phi = pi.TestFunction(approx_lbl)
weak_form = pi.WeakFormulation([
pi.ScalarTerm(pi.Product(pi.Input(u), phi(1)), scale=EI),
pi.ScalarTerm(pi.Product(x.derive(spat_order=3)(0), phi(0)),
scale=-EI),
pi.ScalarTerm(pi.Product(x.derive(spat_order=2)(0), phi.derive(1)(0)),
scale=EI),
pi.ScalarTerm(pi.Product(x.derive(spat_order=1)(1), phi.derive(2)(1)),
scale=EI),
pi.ScalarTerm(pi.Product(x(1), phi.derive(3)(1)),
scale=-EI),
pi.IntegralTerm(pi.Product(x, phi.derive(4)),
spat_bounds,
scale=EI),
pi.IntegralTerm(pi.Product(x.derive(temp_order=2), phi),
spat_bounds,
scale=mu),
], name=sys_name)
# initial conditions
init_form = pi.ConstantFunction(0, domain=spat_bounds)
init_form_dt = pi.ConstantFunction(0, domain=spat_bounds)
initial_conditions = [init_form, init_form_dt]
# simulation
with np.errstate(under="ignore"):
eval_data = pi.simulate_system(weak_form,
initial_conditions,
temp_domain,
spat_domain,
settings=dict(name="vode",
method="bdf",
order=5,
nsteps=1e8,
max_step=temp_domain.step))
pi.tear_down([approx_lbl])
# recover the input trajectory
u_data = u.get_results(eval_data[0].input_data[0], as_eval_data=True)
# visualization
if show_plots:
plt.plot(u_data.input_data[0], u_data.output_data)
win1 = pi.PgAnimatedPlot(eval_data,
labels=dict(left='x(z,t)', bottom='z'))
pi.show()
if __name__ == "__main__":
run(True)